
机械工程-机电经验分享
自从来加拿大已经有3年半的时间了,生活学习已经积累了一些经验,其中有一段关于在大学期间做机械工程--机电项目的经验,想分享给大家。
这是一门叫Sensors and Instrumentation的四年级专业课,这门课主要是讲关于各种感应器和它们的应用。从这门课一开始,教授就布置了这门课的工程项目--用但摄像头测量物体即时尺寸和距离。随着课程的深入,我们逐渐了解了各个感应器的功能,接受外界条件并转化成电子信号,0或1,再把电子信号传输给处理器。不同的感应器能感受不同的外界环境,例如温度感应器和压力感应器。这个项目占总成绩的7%,完成额外项目(摄像头与物体成任意角度)可以提升到15%,误差不超过5%。这是一个非常有挑战性的项目,下面我就分享下我的小组是如何完成项目与额外项目的经验。
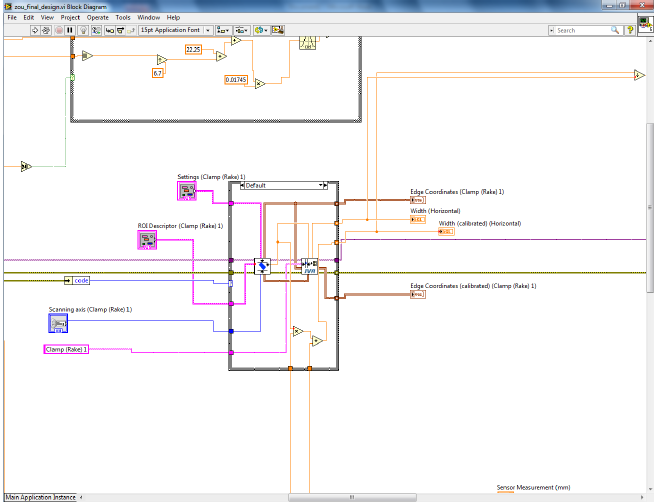
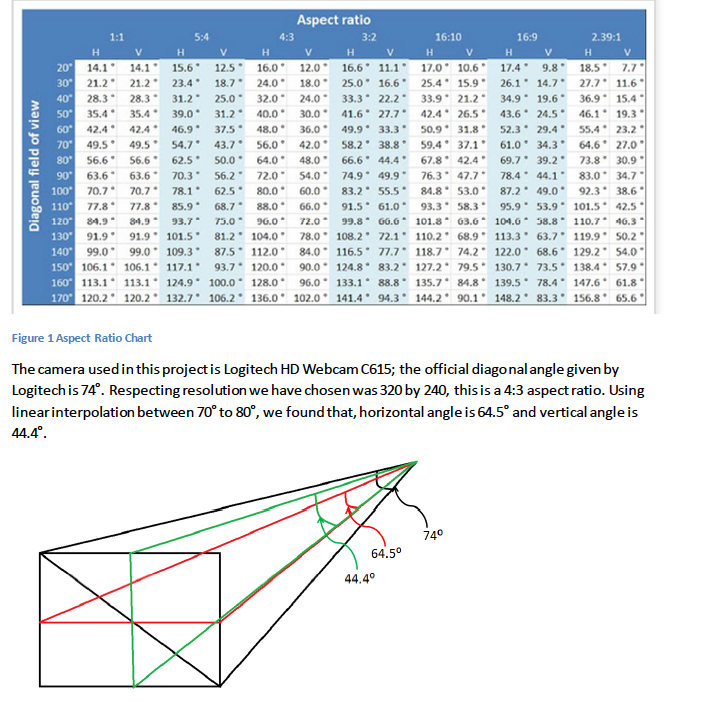
我们小组有4个人,我是组长,负责制定计划,分配任务,设计与审核的任务。刚开始,面对一个完全陌生的图像处理编程软件,LabView,束手无策的状态持续了很旧。 伴随着不断的尝试与摸索,对LabView的熟悉程度总不是很理想。在此同时,我们设计了很多思路。摄像头,一个图像感应器,他可以接受到外界信号并转化成数字信号。我们要用他测量物体的尺寸,就要把我们认知的单位转化成机器认知的单位,那就是长度转化成像素。经过缜密的思索,最终采用了我的设计,建立长度与像素的关系。7%的部分摄像头是垂直于物体的,所以不用担心角度。通过一次矫正便能建立起关系,思路是,通过LabView读取物体的像素,再实际测量物体的尺寸,建立不同的数学模型找到最佳的关系并加入摄像头到物体的参数,从而完成矫正。建立好模型后,保持摄像头的位置不变,无论如何换物体,读取出的像素总是能通过模型转化成距离。思路建立好后,我们开始了漫长的编程探索。经过几星期的实验,我们决定把图像进行threshold, 一张图分解成红,绿,蓝三原色。背景选取浅色,物体选取深色,过滤掉高亮,剩下的红色就是我们测量的物体。接下来就是极为复杂的编程工作。如果说画草图需要一个月,造模型需要一整年,我把编程工作比喻成最后的一年。经过一个月每个下午和晚上大量时间泡在实验室,组员们被磨得没了脾气,一个组员彻底放弃了,另一个沮丧无比,剩下一个已经不想再做下去了。放弃不是我擅长的,劝回两个组员,把我的设计方案详细介绍给大家,我们终于在截至日期前两天做了出来,并且误差在5%以内。这样7%就拿到了,我非常想拿到15%,而且项目做了这么久,只剩两天,我必须要继续下去。额外的部分很难,摄像头于物体不再是垂直的,同样长的物体在远端会比在近端短。原来的平面测量转换成了立体测量,简单的矫正已经不在适用。绞尽脑汁,我想出了把角度和项素结合起来设计。这个设计需要一次矫正,测量出摄像头的高度和于竖直平面夹角这两个已知量,再建立角度,像素与高度的关系模型(像素/角度),输入常量,计算机根据摄像头输入的像素,过滤掉编程设计好的背景,读出像素,通过模型计算出尺寸。完成这一步,再比较物体实际尺寸,结果是,成功了!这个结果不仅是两天泡在实验室的结果,还要再加上之前一个月付出的努力与一次次的失败。
最终的项目展示与演讲,我们组政府了教授,拿到了最高分。不仅结果误差惊人的小,而且还有两个窗口展示实际物体与过滤后的图像,达到实时测量的目标。通过这个项目,不仅锻炼了学术上的能力和领导队伍的能力,更重要的是我体验到了坚持不懈的重要性,别人嘴里听来的,书上看到的都是身外之物,只有自己亲身经历过的才是最深刻的。

这是一门叫Sensors and Instrumentation的四年级专业课,这门课主要是讲关于各种感应器和它们的应用。从这门课一开始,教授就布置了这门课的工程项目--用但摄像头测量物体即时尺寸和距离。随着课程的深入,我们逐渐了解了各个感应器的功能,接受外界条件并转化成电子信号,0或1,再把电子信号传输给处理器。不同的感应器能感受不同的外界环境,例如温度感应器和压力感应器。这个项目占总成绩的7%,完成额外项目(摄像头与物体成任意角度)可以提升到15%,误差不超过5%。这是一个非常有挑战性的项目,下面我就分享下我的小组是如何完成项目与额外项目的经验。
我们小组有4个人,我是组长,负责制定计划,分配任务,设计与审核的任务。刚开始,面对一个完全陌生的图像处理编程软件,LabView,束手无策的状态持续了很旧。 伴随着不断的尝试与摸索,对LabView的熟悉程度总不是很理想。在此同时,我们设计了很多思路。摄像头,一个图像感应器,他可以接受到外界信号并转化成数字信号。我们要用他测量物体的尺寸,就要把我们认知的单位转化成机器认知的单位,那就是长度转化成像素。经过缜密的思索,最终采用了我的设计,建立长度与像素的关系。7%的部分摄像头是垂直于物体的,所以不用担心角度。通过一次矫正便能建立起关系,思路是,通过LabView读取物体的像素,再实际测量物体的尺寸,建立不同的数学模型找到最佳的关系并加入摄像头到物体的参数,从而完成矫正。建立好模型后,保持摄像头的位置不变,无论如何换物体,读取出的像素总是能通过模型转化成距离。思路建立好后,我们开始了漫长的编程探索。经过几星期的实验,我们决定把图像进行threshold, 一张图分解成红,绿,蓝三原色。背景选取浅色,物体选取深色,过滤掉高亮,剩下的红色就是我们测量的物体。接下来就是极为复杂的编程工作。如果说画草图需要一个月,造模型需要一整年,我把编程工作比喻成最后的一年。经过一个月每个下午和晚上大量时间泡在实验室,组员们被磨得没了脾气,一个组员彻底放弃了,另一个沮丧无比,剩下一个已经不想再做下去了。放弃不是我擅长的,劝回两个组员,把我的设计方案详细介绍给大家,我们终于在截至日期前两天做了出来,并且误差在5%以内。这样7%就拿到了,我非常想拿到15%,而且项目做了这么久,只剩两天,我必须要继续下去。额外的部分很难,摄像头于物体不再是垂直的,同样长的物体在远端会比在近端短。原来的平面测量转换成了立体测量,简单的矫正已经不在适用。绞尽脑汁,我想出了把角度和项素结合起来设计。这个设计需要一次矫正,测量出摄像头的高度和于竖直平面夹角这两个已知量,再建立角度,像素与高度的关系模型(像素/角度),输入常量,计算机根据摄像头输入的像素,过滤掉编程设计好的背景,读出像素,通过模型计算出尺寸。完成这一步,再比较物体实际尺寸,结果是,成功了!这个结果不仅是两天泡在实验室的结果,还要再加上之前一个月付出的努力与一次次的失败。
最终的项目展示与演讲,我们组政府了教授,拿到了最高分。不仅结果误差惊人的小,而且还有两个窗口展示实际物体与过滤后的图像,达到实时测量的目标。通过这个项目,不仅锻炼了学术上的能力和领导队伍的能力,更重要的是我体验到了坚持不懈的重要性,别人嘴里听来的,书上看到的都是身外之物,只有自己亲身经历过的才是最深刻的。
4 个评论
文科生……默默点赞飘走~
虽然还是看不懂,不过还是留言调戏你一下~(●'◡'●)
被调戏了